Infra Rood Remote Control Analyzer
In infra rood afstandbediening zijn meerdere soorten.
De belangrijkste zijn de Philips varianten RC-5 en RC-6 en diverse Japanse varianten die dicht bij elkaar komen zoals NEC en JVC.
De bovenstaande links verwijzen naar de site: http://www.sbprojects.com/-knowledge/ir/index.php die ook nog over meerdere systemen informatie geeft.
Zoals op de boven genoemde site beschreven, bestaat infra rood communicatie uit het versturen van licht puls treintjes, de meest gebruikte frequenties liggen tussen de 36 en 38Khz. Hiervoor zijn diverse ontvang modules verkrijgbaar, die bestaan uit een infra rood detector(diode), versterker, filter en demodulator.
Wat deze modules eigenlijk doen is het puls treintje omzetten in een blokgolf en verder alle storende signalen (zon, tl licht e.d.) zo veel mogelijk uitschakelen.
De ontvangst modules zoals TSOP1738 zijn eenvoudig aan te sluiten op een ingangs poort van een microcontroller. (wel is er soms een pull up weerstandje nodig). Het onderstaande schema laat zien hoe dit te doen op een PIC 18F25K22 of pin equivalent type.
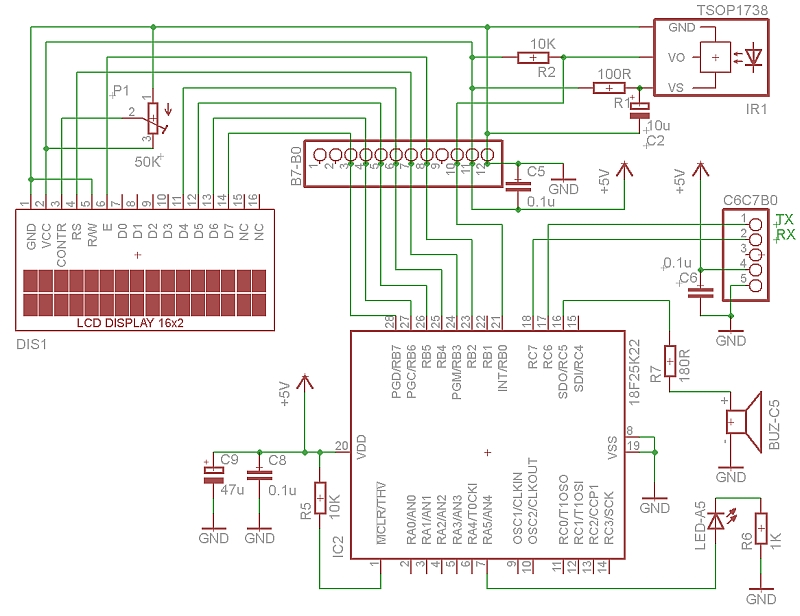 R1 en C2 dienen om de voedingsspanning van de TSOP1738 zoveel mogelijk te ontkoppelen van de hoofd voedings-spanning, daar de modules erg gevoelig zijn. R2 is een pull up weer-stand (de TSOP1738 heeft een interne pull up van 80K). Het 2×16 display, de LED en de speaker zijn optioneel. Alle output gaat ook via de seriële poort.
R1 en C2 dienen om de voedingsspanning van de TSOP1738 zoveel mogelijk te ontkoppelen van de hoofd voedings-spanning, daar de modules erg gevoelig zijn. R2 is een pull up weer-stand (de TSOP1738 heeft een interne pull up van 80K). Het 2×16 display, de LED en de speaker zijn optioneel. Alle output gaat ook via de seriële poort.
Bovenstaand schema is eenvoudig op het 28PIC moederbordje te realiseren.
In de 18F25K22 programmeren we een programmaatje dat de lengte van de pulstreintjes en de pauzes die daar op volgen laat zien. het programma laat tot 100 pulstreintjes zien (via seriële poort). Met het windows programma “Poort-tester” (Knutselaar’s simpele serial port terminal) kan de seriële output zichtbaar gemaakt worden. Het FTDI FT230 opsteek bordje kan hier goed gebruikt worden om een Com poort via een USB verbinding te creëren. Een tweede mogelijkheid is de PICkit2 Uart Tool (hoofdstuk 7) te gebruiken.
Op het 16×2 display worden de ontvangen bytes getoond, (in de seriële output ook overigens) dit zijn meestal 4 bytes. De tweede regel toont de vier bytes van een volgende verzending als deze binnen 200ms binnenkomt (sommige fabrikanten (pioneer) hebben onder bepaalde toesten een dubbel code zitten).
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 | '**************************************************************************** '* Name : IR remote control analyser * '* Author : Knutselaar.eu * '* Notice : Copyright (c) 2012 Knutselaar.eu * '* : All Rights Reserved * '* Date : 10 May 2012 * '* Version : 1.0 * '* Compiler: Proton Basic of Amicus18 * '* Notes : IR remote control timing naar serieele poort * '* : (gebruik SerialPort Tester 2.0 (download www.knutselaar.eu)) * '* : IR remote data naar display en serieele poort (NEC en * '* aanverwanten. * '* : Werkt deels (alleen timing) voor RC5 and RC6 * '**************************************************************************** Device 18F25K22 CONFIG_START FOSC = INTIO67 ;Internal oscillator block, port function on RA6 and RA7 FCMEN = Off ;Fail-Safe Clock Monitor disabled IESO = Off ;internal external switchover mode ;PWRT = On ;power-up timer For 18F25K20 PWRTEN = On ;power-up timer For 18F25K22 BOREN = On ;brown-out reset ;BORV = 27 ;brown-out reset value (2,7V) For 18F25K20 BORV = 285 ;brown-out reset value (2,85V) for 18F25K22 WDTEN = Off ;watchdog timer WDTPS = 128 ;1:128 WDT prescalar PBADEN = Off ;analog port B<4:0> STVREN = On ;stack overflow reset LVP = Off ;low voltage programming XINST = Off ;Instruction set extension and Indexed Addressing mode disabled (Legacy mode) Debug = Off ;no debug CONFIG_END XTAL 64 HSERIAL_BAUD = 9600 ; Transmissiesnelheid van de data over de bus HSERIAL_RCSTA = %10010000 ; Bit7:Enable serial port / Bit4:Continu ontvangen HSERIAL_TXSTA = %00100000 ; Bit5:Transmitpin ingeschakeld (TXEN (Transmit ENable) = 1) HSERIAL_CLEAR On Symbol IR_PIN = PORTB.0 ; 38Khz ir ontvanger op poort B.0 Symbol Speaker = PORTC.5 Symbol LEDGreen = PORTA.5 Dim u As Byte ; serieel uit puls teller Dim v As Byte ; hulp variable Dim w As Byte ; byte teller Dim x As Word ; timing teller voor puls aan Dim y As Word ; timing teller voor puls uit Dim z As Byte ; puls teller Dim bitStart As Byte Dim onArray[100] As Word ; puls tijd aan array Dim offArray[100] As Word ; puls tijd uit array Dim a_bit As Byte ; eerste ontvangst byte Dim b_bit As Byte Dim c_bit As Byte Dim d_bit As Byte ; vierde ontvangst byte Dim e_bit As Byte ; eerste ontvangst byte tweede commando (binnen 200ms) Dim f_bit As Byte Dim g_bit As Byte Dim h_bit As Byte ; vierde ontvangst byte tweede commando (binnen 200ms) Dim x_bit As Byte Dim lowLimit As Word Dim highLimit As Word OSCCON = %01110000 ; 16Mhz intern osc OSCTUNE= %01000000 ; 4x PLL aan geeft 64Mhz ANSELA = %00000000 ; 18F25K22 poort A digitaal ANSELB = %00000000 ; 18F25K22 poort B digitaal ANSELC = %00000111 ; 18F25K22 Poort C RX,TX,C5,SCL en SDA digitaal ;ALL_DIGITAL TRUE ; Alle poorten digitaal voor 18F25K20 Clear ; wis geheugen Cls ; init display Sound Speaker , [115,20] Print At 1, 1, "Knutselaar.eu " Print At 2, 1, "IR remote tester" DelayMS 2000 loop: While IR_PIN = 1 : Wend High LEDGreen ; groen aan For z = 1 To 99 For x = 1 To 2000 ; max 20 ms timer If IR_PIN = 1 Then onArray[z] = x GoTo skipx End If DelayUS 9 ; 9us + ongeveer 1uS reken tijd Next x skipx: For y = 1 To 20000 ; max 200 ms timer If IR_PIN = 0 Then offArray[z] = y GoTo skipy End If DelayUS 9 Next y Low LEDGreen GoTo timeout ; timeout skipy: Next z timeout: x = 0 lowLimit = 70 highLimit = 130 HSerOut ["on off ",13] HSerOut [DEC4 onArray[1]," ",DEC5 offArray[1]," start",13] ' start puls If onArray[1] < 300 Then ' te korte start puls HSerOut [DEC4 onArray[2]," ",DEC5 offArray[2]," start",13] bitStart = 3 Else bitStart = 2 End If HSerOut [13] For u = bitStart To z If offArray[u] > 1400 Then ' >14 ms geen puls HSerOut ["on off ",13] ' nieuwe start puls v = u x = 0 Else If u <> z Then HSerOut [DEC4 onArray[u]," ",DEC5 offArray[u]," ",Dec x,13] ' laatste niet printen If u > 1 And u = v +1 Then HSerOut [13] Else x = x + 1 End If End If Select x Case 1 If offArray[u] < lowLimit Then x_bit.0 = 0 If offArray[u] > highLimit Then x_bit.0 = 1 Case 2 If offArray[u] < lowLimit Then x_bit.1 = 0 If offArray[u] > highLimit Then x_bit.1 = 1 Case 3 If offArray[u] < lowLimit Then x_bit.2 = 0 If offArray[u] > highLimit Then x_bit.2 = 1 Case 4 If offArray[u] < lowLimit Then x_bit.3 = 0 If offArray[u] > highLimit Then x_bit.3 = 1 Case 5 If offArray[u] < lowLimit Then x_bit.4 = 0 If offArray[u] > highLimit Then x_bit.4 = 1 Case 6 If offArray[u] < lowLimit Then x_bit.5 = 0 If offArray[u] > highLimit Then x_bit.5 = 1 Case 7 If offArray[u] < lowLimit Then x_bit.6 = 0 If offArray[u] > highLimit Then x_bit.6 = 1 Case 8 If offArray[u] < lowLimit Then x_bit.7 = 0 If offArray[u] > highLimit Then x_bit.7 = 1 End Select If x = 8 Then w = w + 1 ' byte teller Select Case w Case 1 a_bit = x_bit Case 2 b_bit = x_bit Case 3 c_bit = x_bit Case 4 d_bit = x_bit Case 5 e_bit = x_bit Case 6 f_bit = x_bit Case 7 g_bit = x_bit Case 8 h_bit = x_bit End Select End If If x = 8 Then ' scheiding 8 bits HSerOut [13] x=0 End If Next u If z > 4 Then Print At 1,1, HEX2 a_bit, " ", HEX2 b_bit, " ",HEX2 c_bit, " ",HEX2 d_bit," " Print At 2,1, HEX2 e_bit, " ", HEX2 f_bit, " ",HEX2 g_bit, " ",HEX2 h_bit," " HSerOut ["Data:",13] HSerOut [ HEX2 a_bit, " ", HEX2 b_bit, " ",HEX2 c_bit, " ",HEX2 d_bit,13 ] HSerOut [ HEX2 e_bit, " ", HEX2 f_bit, " ",HEX2 g_bit, " ",HEX2 h_bit,13 ] End If Clear Low LEDGreen Sound Speaker , [115,20] GoTo loop End |
Het bovenstaand programma werkt redelijk goed voor het NEC protocol en aanverwanten.
Dit soort protocollen bestaat uit een startpuls van ongeveer 9ms gevolgd door een pauze van +/- 4,5ms, daarna volgen pulsjes van ongeveer 0,5ms. de lengte van de pauzes die na deze korte pulsjes komen bepaald of er een “0” of “1” verzonden wordt. Totaal worden er op deze manier meestal 4 bytes verzonden (32 korte pulsjes). De eerste twee bytes vormen meestal het adres, het derde byte is meestal het commando, het vierde byte meestal het geinverteerde derde byte (ter controle), bij sommige wordt het vierde byte als extensie gebruikt en is er geen controle.
op http://learn.adafruit.com/ir-sensor vind je een soortgelijk programma voor de Arduino, het idee is dus niet helemaal ven mijzelf.
Download met .bas en .hex files voor de TSOP1738 en 18F25K22 plus schema TSOP17.zip